S7 1500 İle PID Kontrol Uygulaması Nasıl Yapılır?
Bu yazımızda, TIA Portal programlama aracı ile SIMATIC S7-1500 için yazılım PID kontrolörlerinin kullanımı hakkında bilgiler verilecektir. Modül, SIMATIC S7-1500 için bir PID kontrol cihazının çağrılmasını, bağlantısını, konfigürasyonunu ve optimizasyonunu açıklar. Ayrıca, TIA Portal’da PID denetleyicisini çağırma ve onu bir kullanıcı programına entegre etme adımlarını da gösterir. SIMATIC S7 kontrolörleri kullanılabilir.
Bu bölüm, SIMATIC S7 CPU1516F-3 PN/DP ile Analog Değerler bölümüne dayanmaktadır. Bu bölüm için aşağıdaki proje kullanılabilir, örneğin: “SCE_EN_032-500_Analog_Values_R1508.zap13“.
Kullanılacak dosyaların bulunduğu Siemens’in internet sitesine gitmek için => TIKLAYINIZ
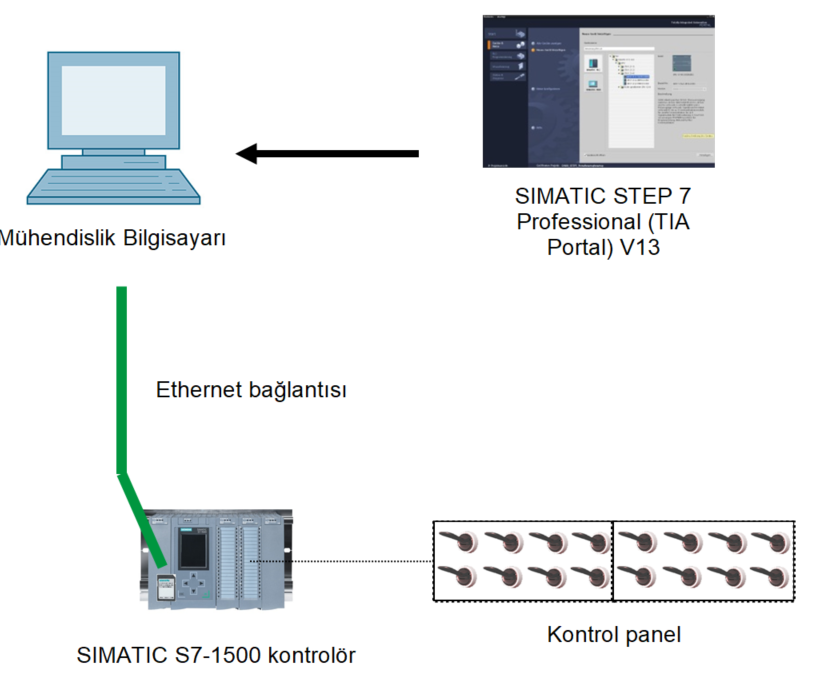
Uygulama için Donanım ve Yazılım Gereklilikleri
- Mühendislik istasyonu: gereksinimler donanım ve işletim sistemini içerir(ek bilgi için, TIA Portal Kurulum DVD’lerinde BeniOku’ya bakın)
- SIMATIC STEP 7 TIA Portal’da profesyonel yazılım – V13’ten itibaren
- SIMATIC S7-1500/S7-1200/S7-300 kontrolör, örn. CPU 1516F-3 PN/DP Bellek kartı ve 16DI/16DO ve 2AI/1AO ile V1.6’dan itibaren bellenim
Not: Dijital girişler ve analog girişler ve çıkışlar bir kontrol paneline beslenmelidir.
- Mühendislik istasyonu ve kontrolör arasında Ethernet bağlantısı
Adım Adım Projenin Uygulanışı
Planlamanın nasıl yapılacağına ilişkin talimatlar aşağıda bulunmaktadır. Talimatlardaki ayrıntılı adımları uygulamak yeterlidir.
Zaten Mevcut Olan bir Proje Nasıl Kurtarılır?
-> “SCE_EN_032-500_Analog_Values_R1508.zap13” projesini “SCE_EN_032-500_Analog_Values” bölümünden genişletmeden önce, bu projeyi arşivden alınmalıdır. Arşivlenmiş mevcut bir projeyi geri almak için proje görünümünde -> Proje ->Al ile ilgili arşivi seçilmeliidr. Seçim Aç(Open) ile onaylanır.
(-> Proje(Project) -> Al(Retrieve) -> Bir .zap arşivi seçilir -> Aç(Open))
-> Sonraki adım, alınan projenin saklanacağı hedef dizini seçmektir. Seçim “OK” ile onaylanır.
(-> Hedef dizin(Target directory) -> Tamam(OK))
-> Açılan projeyi 052-300_PID_Controller adı altında kaydedilir.
(-> Proje(Project) -> Farklı kaydet … (Save As…)-> 052-300_PID_Controller -> Kaydet(Save)

Döngüsel bir Kesme OB’sinde PID_Compact Denetleyicisi Nasıl Çağırılır?
-> Çift tıklama ile “Ana [OB1]” organizasyon bloğu açılır.

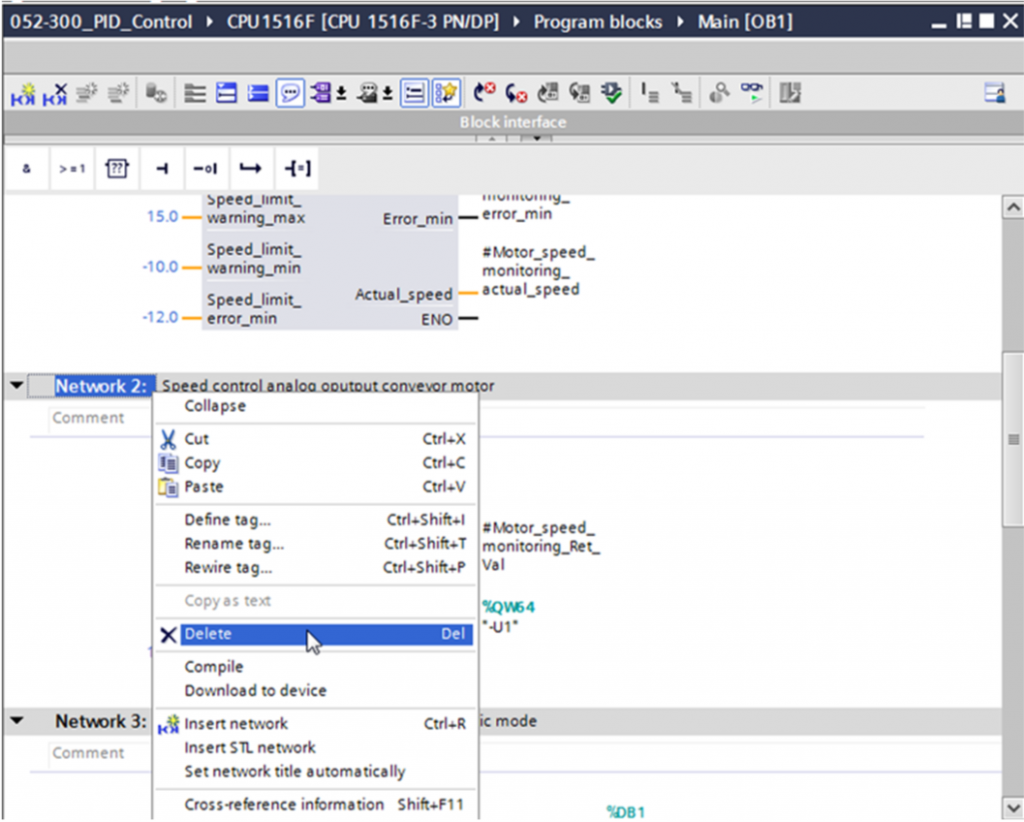
-> “MOTOR_SPEEDCONTROL” [FC10] işlevinin artık gerekmeyen çağrılmasıyla Ağ 2’yi silinir.
(-> Ağ 2(Network 2) -> Sil(Delete))
-> PID_Compact denetleyicisini çağırmak için döngüsel bir kesme OB’sine ihtiyaç vardır. Bu nedenle, Program blokları klasöründe ‘Yeni blok ekle(Add new block)’ öğesini seçin.
(-> Program blokları(Program blocks) -> Yeni blok ekle(Add new block))

-> Sonraki iletişim kutusunda ![]() seçin ve döngüsel kesme OB’sini şu şekilde yeniden adlandırılır: “Çevrimsel kesme 50ms”. Dili FBD’ye ayarlanır ve döngüsel süre olarak “50000 µs” atanır. “Yeni ekle ve aç(Add new and ope)” onay kutusunu seçilir. “Tamam(OK)” tıklanır.
seçin ve döngüsel kesme OB’sini şu şekilde yeniden adlandırılır: “Çevrimsel kesme 50ms”. Dili FBD’ye ayarlanır ve döngüsel süre olarak “50000 µs” atanır. “Yeni ekle ve aç(Add new and ope)” onay kutusunu seçilir. “Tamam(OK)” tıklanır.
(->![]() -> Ad: Döngüsel kesme 50ms(Name: Cyclic interrupt 50ms ) -> Dil: FBD(Language: FBD) -> Döngüsel süre (ms): 50000(Cyclic time (ms): 50000 ) ->
-> Ad: Döngüsel kesme 50ms(Name: Cyclic interrupt 50ms ) -> Dil: FBD(Language: FBD) -> Döngüsel süre (ms): 50000(Cyclic time (ms): 50000 ) -> ![]() Yeni ekle ve aç(Add new and open) -> Tamam(OK))
Yeni ekle ve aç(Add new and open) -> Tamam(OK))

-> Blok daha sonra doğrudan açılır. Anlamlı yorumlar girilir ve ‘PID_Compact’ teknoloji nesnesi sürüklenir ve bırak yöntemini kullanarak Ağ 1’e taşınır.
(-> Teknoloji(Technology) -> PID Kontrolü(PID Control) -> Kompakt PID(Compact PID) -> PID_Compact)

-> Örnek veri bloğu için bir isim atanır ve OK ile uygulanır.
(-> PID_Compact_Motor_Speed -> Tamam(OK))

-> ‘![]() ‘ okuna tıklayarak bloğun görünümü genişletilir. Bu bloğu burada gösterildiği gibi ayar noktası (sabit: 15.0), gerçek değer (genel etiket “-B8”), manipüle edilmiş değişken (genel etiket “-U1”) ve denetleyiciyi devre dışı bırakmak için Sıfırlama girişi (genel etiket “-Q3”) ile birbirine bağlanır . ‘Sıfırla(Reset)’ giriş engellenir. Kontrolörün konfigürasyon maskesi ‘
‘ okuna tıklayarak bloğun görünümü genişletilir. Bu bloğu burada gösterildiği gibi ayar noktası (sabit: 15.0), gerçek değer (genel etiket “-B8”), manipüle edilmiş değişken (genel etiket “-U1”) ve denetleyiciyi devre dışı bırakmak için Sıfırlama girişi (genel etiket “-Q3”) ile birbirine bağlanır . ‘Sıfırla(Reset)’ giriş engellenir. Kontrolörün konfigürasyon maskesi ‘![]() ‘ daha sonra açılabilir.
‘ daha sonra açılabilir.
(->![]() -> 15.0 -> “-B8” -> “-U1” -> -Q3 ->
-> 15.0 -> “-B8” -> “-U1” -> -Q3 ->![]() ->
-> ![]() )
)

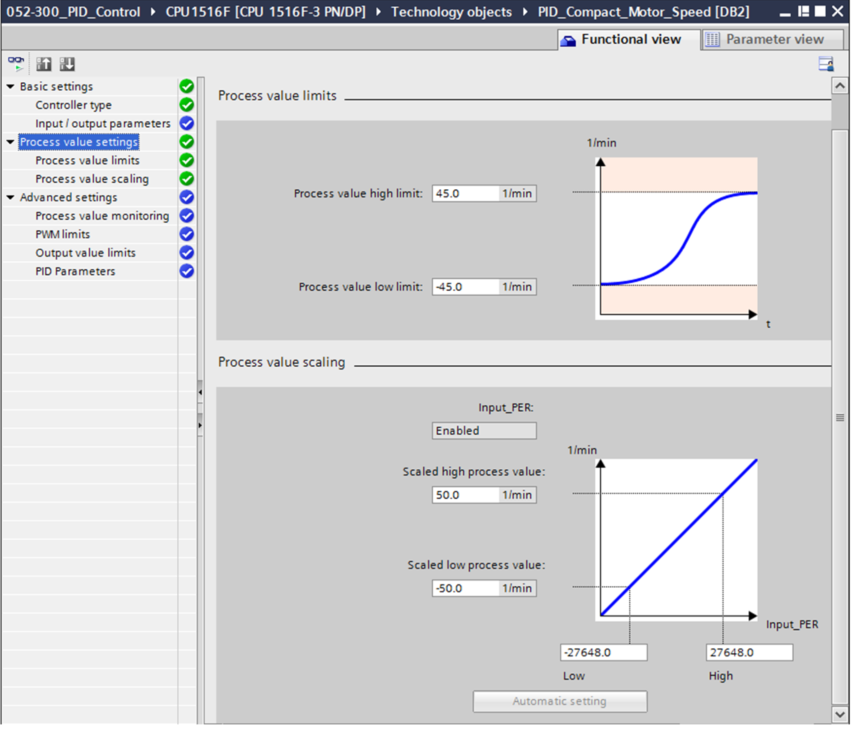
-> Kontrol cihazının konfigürasyonu için 2 görünüm vardır: Parametre görünümü(Paramater View) ve İşlevsel görünüm(Functional View). Burada anlaşılması daha kolay olan ‘İşlevsel görünümü’ kullanacağız.
(->Fonksiyonel görünüm(Functional View))

->Temel ayarlar(Basic Settings)’da, ‘Kontrolör tipi(Controller Type)’ ve ‘Giriş / çıkış parametrelerinin(Input / output parameters)’ ara bağlantısı girilir. Değerleri burada gösterildiği gibi ayarlanır.
(-> Temel ayarlar(Basic Settings)-> Kontrolör tipi (Controller Type)-> Giriş / çıkış parametreleri(Input / output parameters))

-> ‘Proses değeri ayarlarında’ +/- 50 rpm aralığına ölçeklendirilir ve +/- 45 rpm’lik ‘Proses değeri limitlerini(Process value limits)’ tanımlanır.
(-> Proses değeri ayarları(Process Value Settings) -> Proses değeri limitleri(Process Value Limits) -> Proses değeri ölçeklendirmesi(Process Value Scaling))
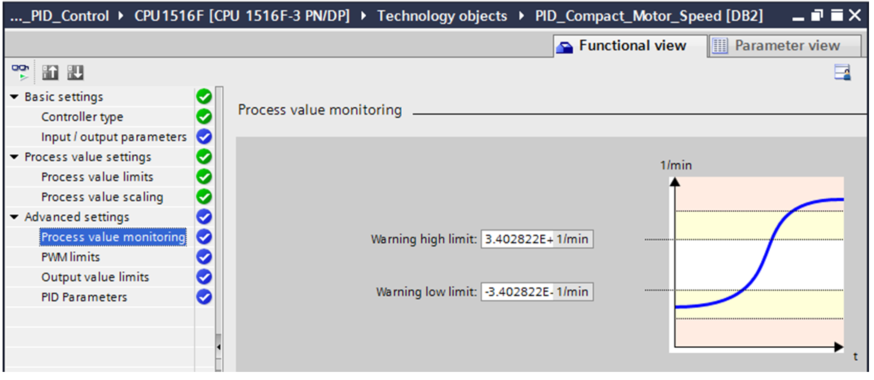
-> ‘Gelişmiş ayarlar(Advenced Settings)’da, bir proses değeri izleme mümkün olabilir, ancak bununla burada uğraşmak istenmiyor.
(-> Gelişmiş ayarlar(Advenced Settings) -> Proses değeri izleme(Process Value Monitoring))
-> ‘PWM’ (darbe genişliği modülasyonu) için ‘Gelişmiş ayarlar’da, projede bunun için çıktıya ihtiyaç duyulmadığından varsayılan değerler kalacaktır.
(-> Gelişmiş ayarlar(Advenced Settings) -> PWM)

-> ‘Gelişmiş ayarlar(Advenced Settings)’da, ‘Çıkış değeri sınırlarını(Output value limits)’ %0.0 ila %100.0 arasında tanımlanır.
(-> Gelişmiş ayarlar(Advenced Settings)-> Çıkış değeri limitleri(Output value limits))

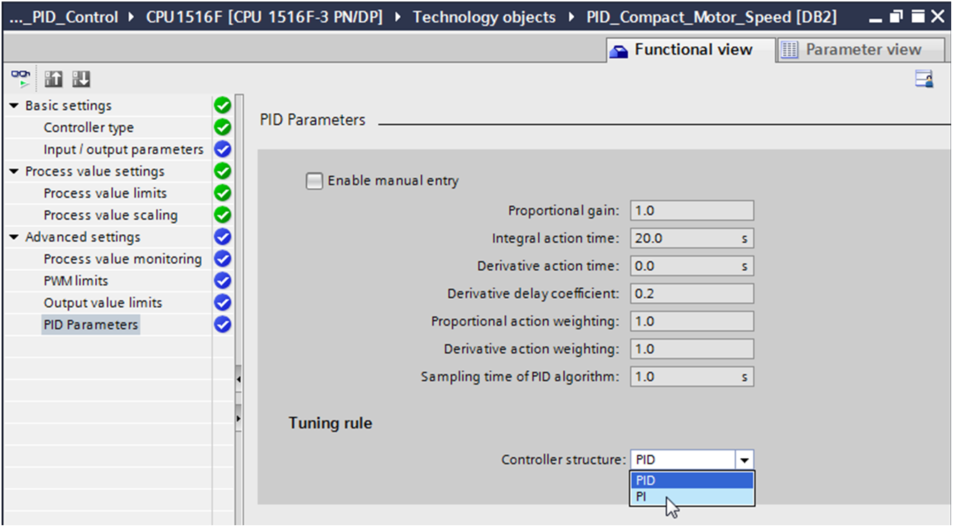
-> ‘Gelişmiş ayarlar(Advenced Settings)’da artık ‘PID parametrelerinin’ manuel ayarı da bulunur. Kontrolör yapısı ‘PI’ olarak değiştirildiğinde, konfigürasyon penceresi ![]() tıklanarak kapatılır ve işlevsel bir PID kontrolörlü bitmiş bir ürün alınır. Bununla birlikte, bu hala işletim sırasında devreye alınmalı ve çevrimiçi olarak ayarlanmalıdır.
tıklanarak kapatılır ve işlevsel bir PID kontrolörlü bitmiş bir ürün alınır. Bununla birlikte, bu hala işletim sırasında devreye alınmalı ve çevrimiçi olarak ayarlanmalıdır.
(-> Gelişmiş ayarlar(Advenced Settings) -> PID Parametreleri(PID Paramaters)-> Kontrolör yapısı: PI (Controller Structure)->![]() )
)
Programın Kaydedilmesi ve Derlenmesi Nasıl Yapılır?
-> Projenin kaydedilmesi için menüdeki ![]() butonuna tıklanır. Tüm blokları derlemek için “Program blokları(Program Blocks)” klasörüne tıklanır ve menüden derleme simgesi
butonuna tıklanır. Tüm blokları derlemek için “Program blokları(Program Blocks)” klasörüne tıklanır ve menüden derleme simgesi ![]() seçilir.
seçilir.
(->![]() -> Program blokları(Program Blocks) ->
-> Program blokları(Program Blocks) ->![]() )
)

-> “Bilgi(Info)”, “Derleme(Compile)” alanı, hangi blokların başarıyla derlendiğini gösterir.

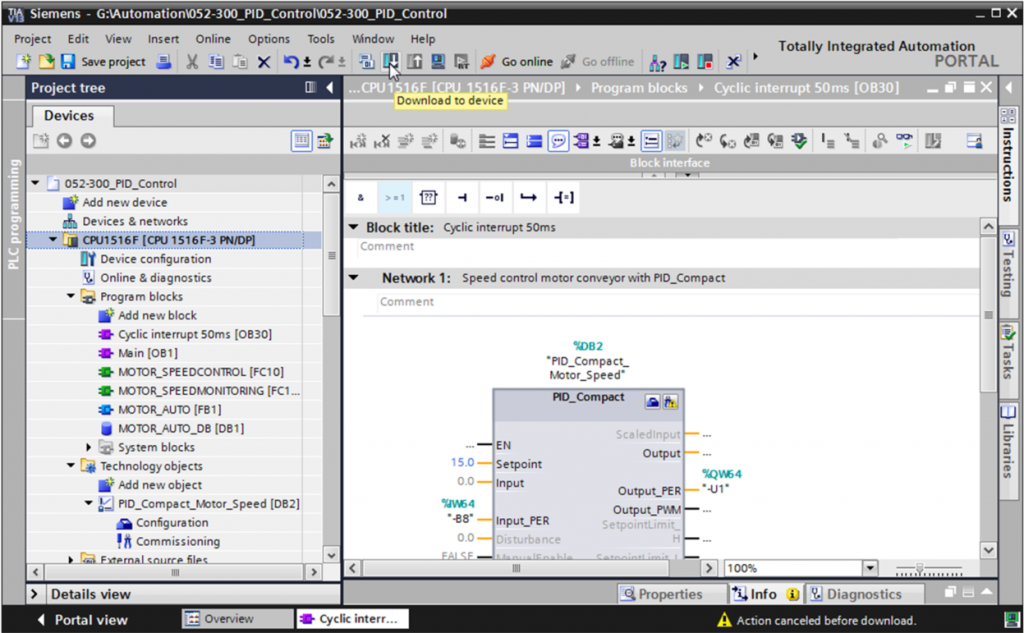
Programın Nasıl Yüklenir?
-> Başarılı bir derlemeden sonra, önceki modüllerde açıklandığı gibi, donanım konfigürasyonu da dahil olmak üzere oluşturulan programla birlikte tam kontrolör indirilebilir.
(->![]() )
)
PID_Compact’ın İzlenmesi Nasıl Yapılır?
-> Programı test ederken blokların ve etiketlerin durumunu izlemek için İzleme açık/kapalı ![]() simgesine tıklanır. Ancak CPU’nun ilk başlangıcında, ‘PID_Compact’ denetleyicisi henüz ayarlanmamıştır. Hala ‘
simgesine tıklanır. Ancak CPU’nun ilk başlangıcında, ‘PID_Compact’ denetleyicisi henüz ayarlanmamıştır. Hala ‘![]() ‘ simgesine tıklayarak ayarlamanın başlatılması gerekiyor.
‘ simgesine tıklayarak ayarlamanın başlatılması gerekiyor.
(-> Döngüsel kesme 50ms [OB30](Cyclic interrupt 50ms [OB30] ) ->![]() -> PID_Compact ->
-> PID_Compact ->![]() )
)

‘Measurement’ altında ![]() tıklarsak set noktası (Setpoint), gerçek değer (ScaledInput) ve manipüle edilen değişken (Output) değerleri bir diyagramda görüntülenebilir ve izlenebilir.
tıklarsak set noktası (Setpoint), gerçek değer (ScaledInput) ve manipüle edilen değişken (Output) değerleri bir diyagramda görüntülenebilir ve izlenebilir.
(->![]() )
)
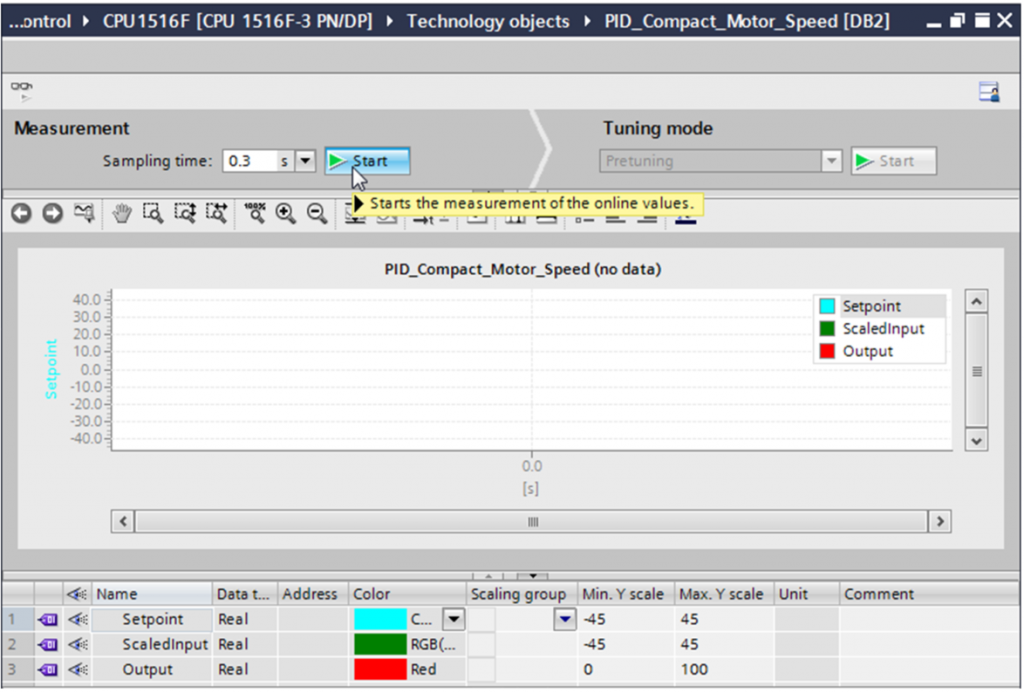
-> Ölçüm, ‘![]() ‘ üzerine tıklanarak tekrar durdurulabilir.
‘ üzerine tıklanarak tekrar durdurulabilir.
(->![]() )
)

PID_Compact Ön Ayarı Nasıl Yapılır?
Ön ayar, çıkış değerindeki bir adım değişikliğine proses tepkisini belirler ve dönüm noktasını arar. PID parametreleri, kontrol edilen sistemin maksimum eğiminden ve ölü zamanından hesaplanır. Ön ayar ve ince ayar yapıldığında optimum PID parametreleri elde edilir.
Gerçek değer ne kadar kararlı olursa, PID parametreleri o kadar kolay ve doğru bir şekilde belirlenebilir. Gerçek değer artışı, gürültüden önemli ölçüde daha büyük olduğu sürece, gerçek değer gürültüsü kabul edilebilir. Bu, büyük olasılıkla “Aktif değil(Inactive)” veya “Manuel mod” çalışma modunda geçerlidir. PID parametreleri yeniden hesaplanmadan önce yedeklenir.
Aşağıdaki gereksinimler karşılanmalıdır:
– “PID_Compact” komutu, bir döngüsel kesme OB’sinde çağrılır.
– ManuelEtkinleştir = YANLIŞ(FALSE)
– Sıfırla(Reset) = YANLIŞ(FALSE)
– PID_Compact “Manuel mod”, “Aktif değil(Inactive)” veya “Otomatik mod(Automatic Mod)” çalışma modunda.
– Ayar noktası ve gerçek değer, yapılandırılan sınırlar içinde (bkz. “İşlem değeri denetimi” yapılandırması).
– Ayar noktası ile gerçek değer arasındaki fark, proses değeri üst limiti ile alt limiti arasındaki farkın %30’undan fazla.
– Ayar noktası ile gerçek değer arasındaki fark, ayar noktasının > %50’si.
-> ‘Ayar modu(Tuning Mode)’ olarak ‘Ön ayar(Pretuning)’ seçilir ve ardından bu başlatılır.
(-> Ayar modu(Tuning Mode) ->Ön ayar(Pretuning) ->![]() )
)
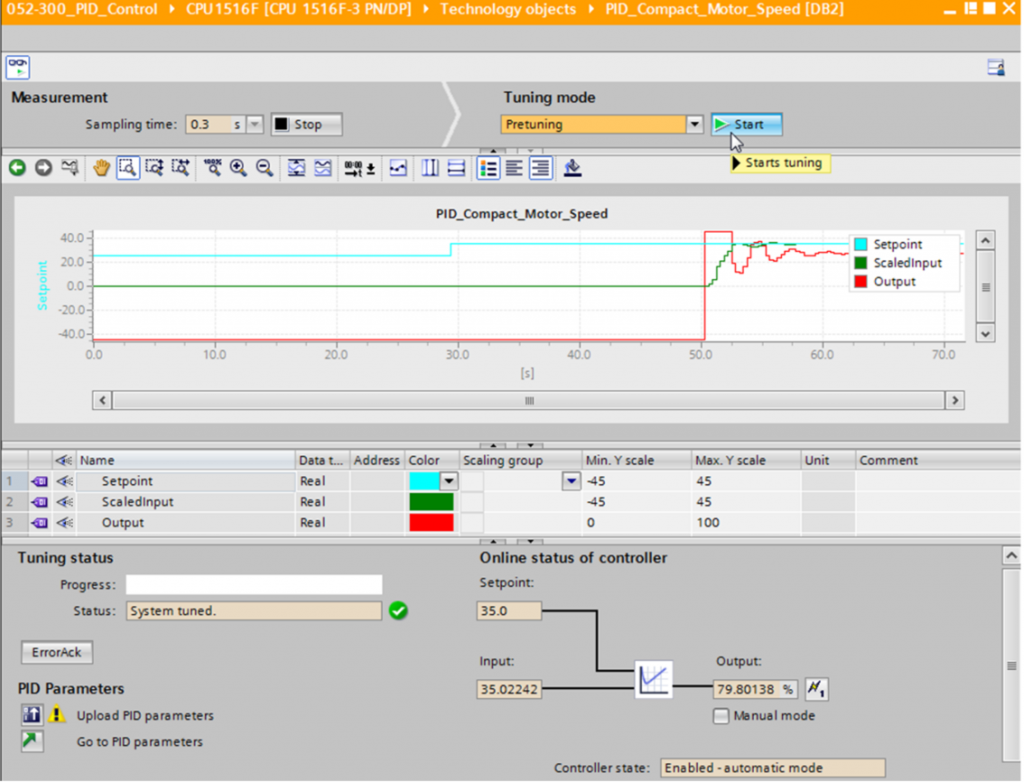
Ön ayar başlar. Mevcut çalışma adımları ve oluşan hatalar “Ayar durumu(Tuning status)” alanında gösterilir. İlerleme çubuğu, mevcut iş adımının ilerlemesini gösterir.

PID_Compact İnce Ayarı Nasıl Yapılır?
İnce ayar, gerçek değerin sabit, sınırlı bir salınımını üretir. PID parametreleri, bu salınımın genliği ve frekansına dayalı olarak çalışma noktası için optimize edilir. Tüm PID parametreleri sonuçlardan yeniden hesaplanır. İnce ayardan kaynaklanan PID parametreleri genellikle ayar noktası değişikliklerine ve bozulmalara ön ayardan gelen PID parametrelerinden daha iyi yanıt verir. Ön ayar ve ince ayar yapıldığında optimum PID parametreleri elde edilir.
PID_Compact otomatik olarak gerçek değer gürültüsünden daha büyük bir salınım oluşturmaya çalışır. İnce ayar, gerçek değerin kararlılığından çok az etkilenir. PID parametreleri yeniden hesaplanmadan önce yedeklenir.
Aşağıdaki gereksinimler karşılanmalıdır:
– “PID_Compact” komutu, bir döngüsel kesme OB’sinde çağrılır.
– ManuelEtkinleştir(ManualEnable) = YANLIŞ(False)
– Sıfırla(Reset) = YANLIŞ(False)
– Ayar noktası(Set Point) ve gerçek değer, yapılandırılmış sınırlar içinde.
– Kontrol çevrimi, çalışma noktasında kararlıdır. Gerçek değer ayar noktasına eşit olduğunda çalışma noktasına ulaşılır.
– Herhangi bir rahatsızlık beklenmemektedir.
– PID_Compact “Manuel mod”, “Aktif değil(Inactive)” veya “Otomatik mod(Automatic Mod)” çalışma modunda.
İnce ayar, otomatik modda başlatıldığında aşağıdaki gibi çalışır:
Mevcut PID parametrelerini ayarlayarak iyileştirmek istediğinizde ince ayara otomatik moddan başlanır.
PID_Compact, kontrol döngüsü kararlı olana ve ince ayar gereksinimleri karşılanana kadar kontrol etmek için mevcut PID parametrelerini kullanır. Ancak o zaman ince ayar başlar.
İnce ayar, etkin değil(Inactive) veya manuel modda(Manual Mode) başlatıldığında aşağıdaki gibi çalışır:
Ön ayar gereksinimleri karşılandığında, ön ayar başlatılır. PID_Compact, kontrol çevrimi kararlı olana ve ince ayar gereksinimleri karşılanana kadar kontrol etmek için belirlenen PID parametrelerini kullanır. Ancak o zaman ince ayar başlar. Ön ayar mümkün değilse, PID_Compact, Response to error’da yapılandırıldığı gibi yanıt verir.
Gerçek değer, ön ayar için ayar noktasına zaten çok yakınsa, minimum veya maksimum çıkış değeriyle ayar noktasına ulaşılmaya çalışılır. Bu, daha fazla aşmaya neden olabilir.
-> ‘Ayar modu(Tuning Mod)’ olarak ‘İnce ayar(Fine Tuning)’ seçilir ve ardından başlatılır.
(-> Ayar modu(Tuning Mod) -> İnce ayar(Fine Tuning) -> ![]() )
)

-> İnce ayar başlar. Mevcut çalışma adımları ve oluşan hatalar “Ayar durumu(Tuning Status)” alanında gösterilir. Self-tuning hata mesajı olmadan tamamlandıysa, PID parametreleri ayarlanmıştır. PID kontrolörü otomatik moda geçer ve ayarlanmış parametreleri kullanır. Ayarlanmış PID parametreleri, Güç AÇIK ve CPU yeniden başlatıldığında korunur. PID parametrelerini CPU’dan projeye ‘![]() ‘ butonu ile indirilebilir.
‘ butonu ile indirilebilir.
(-> ![]() )
)

-> Konfigürasyondaki PID parametreleri ‘ ![]() ‘ tıklanarak görüntülenebilir.
‘ tıklanarak görüntülenebilir.
(->![]() )
)

-> Son adım olarak, çevrimiçi bağlantı kesilmeli ve tüm proje kaydedilmelidir.
(->![]() ->
->![]() )
)
Yapılan Proje Nasıl Arşivlenir?
-> Şimdi tüm projeyi arşivlemek için: -> ‘Proje(Project)’ menüsünde -> ‘Arşivle …(Archive …)’ komutu seçilir. Projenizi arşivlemek istediğiniz klasör seçilir ve “TIA Portal proje arşivi(TIA Portal project archive)” dosya tipiyle kaydedilir.
(-> Proje(Project) -> Arşiv(Archive) -> TIA Portal proje arşivi (TIA Portal project archive)-> 052-300_PID_Controller…. -> Kaydet(Save))

KAYNAKÇA:
HAZIRLAYAN: Mehmet Berat Şen
KURSLARIMIZ
- Endüstriyel Haberleşme Eğitimi – Profinet, Profibus, Endüstriyel Ethernet, OPC, Endüstriyel Wirelessadmin2023-01-13T07:33:42+00:00

Endüstriyel Haberleşme Eğitimi – Profinet, Profibus, Endüstriyel Ethernet, OPC, Endüstriyel Wireless
- Siemens Sinamics S120 Drive Eğitimiadmin2024-01-09T08:35:45+00:00
Siemens Sinamics S120 Drive Eğitimi
- SINAMICS G120 – Parametreler ve Devreye Alma Eğitimiadmin2023-01-13T08:19:12+00:00
SINAMICS G120 – Parametreler ve Devreye Alma Eğitimi
- Siemens S7 300 / 400 Serisi PLC Eğitimiadmin2023-01-13T08:24:35+00:00
Siemens S7 300 / 400 Serisi PLC Eğitimi








İletişim Bilgilerinizi Bırakın Biz Sizi Arayalım!
Sizin memnuniyetiniz, bizim mutluluğumuzdur…
Siz de fikrinizi belirtin